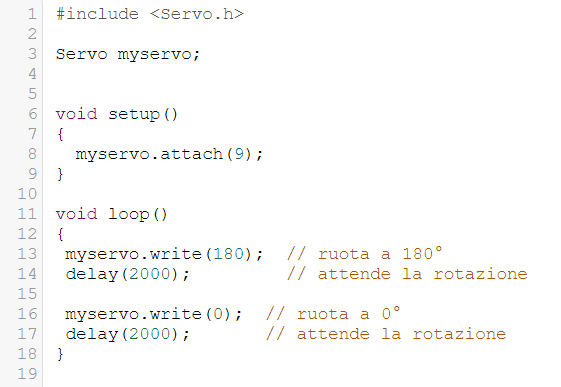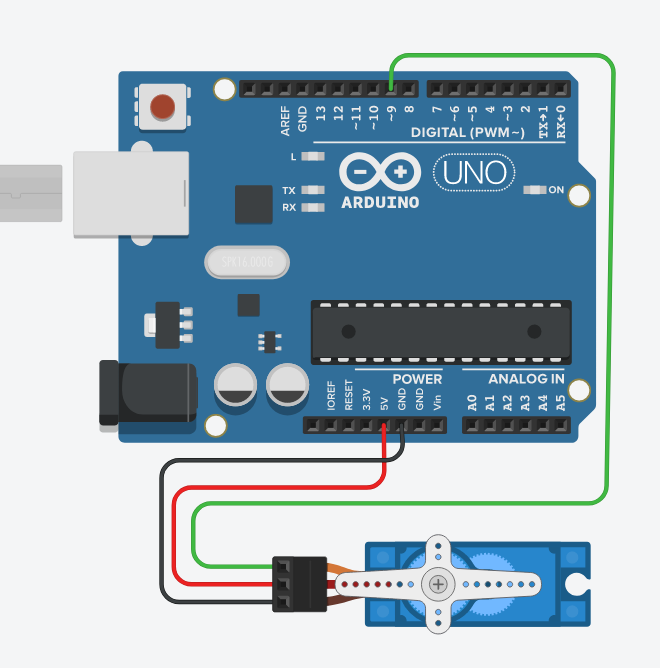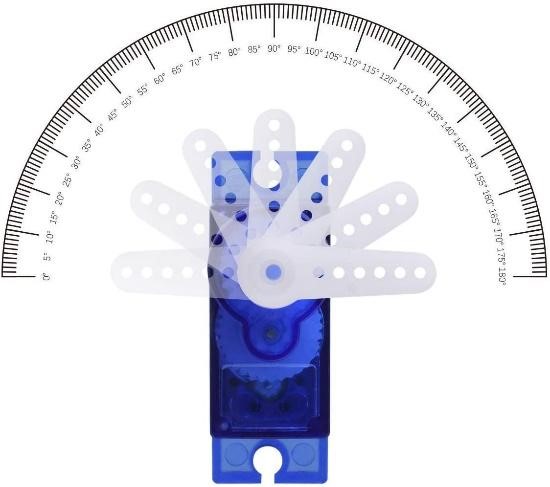
Per pilotare il servomotore bisogna importare una libreria di funzioni aggiuntive dal nome “Servo.h”. All’inizio si dichiara un oggetto Servo dando un nome a piacere (myservo), nel setup si indica a quale pin è collegato il servo, nel loop si scrive il comando sul servo indicando la rotazione voluta. È importante dare il tempo materiale al servo di effettuare la rotazione usando il comando delay: se il delay fosse di 100ms non ci sarebbe il tempo per spostarsi da 0° a 180° e quindi la rotazione sarebbe parziale.